机器可以打败世界上最好的棋手,但它们不能像处理婴儿一样处理棋子。机器人缺乏灵巧性的部分原因是人工抓手缺乏人类指尖的精细触觉,当我们拿起和处理物体时,它被用来指导我们的手。
发表在《皇家学会界面杂志》上的两篇论文首次对人工指尖与人类触觉的神经记录进行了深入比较。该研究由布里斯托大学工程数学系的机器人与人工智能(人工智能)教授 Nathan Lepora 领导,位于布里斯托机器人实验室。
“我们的工作有助于揭示人类皮肤复杂的内部结构如何创造我们人类的触觉。这是软机器人领域令人兴奋的发展——能够3D打印触觉皮肤可以创造出更灵巧的机器人,或者通过赋予假手内置的触觉来显着提高假手的性能,”Lepora 说。
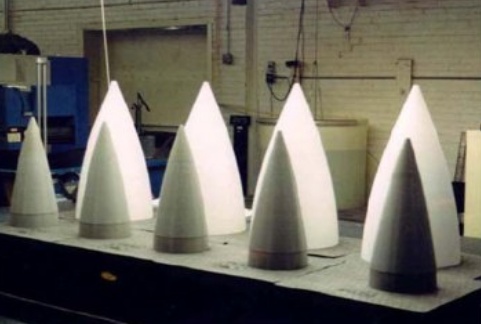
Lepora 和他的同事在人造指尖使用3D打印的针状乳头网在顺应皮肤的下面创造了触觉,它模仿了在人类触觉皮肤的外表皮和内真皮层之间发现的真皮乳头。乳头是在先进的3D打印机上制作的,这些打印机可以混合软硬材料来制造复杂的结构,就像在生物学中发现的那样。
“我们发现我们的3D打印触觉指尖可以产生人工神经信号,这些信号看起来像是来自真实的触觉神经元的记录。人类的触觉神经从称为机械感受器的各种神经末梢传递信号,这些神经末梢可以发出接触压力和形状的信号。菲利普斯和约翰逊在 1981 年的经典著作首先绘制了来自这些神经的电记录,以使用心理学家使用的一组标准脊状形状来研究“触觉空间分辨率”。在我们的工作中,我们测试了我们的3D打印人造指尖,因为它“感觉”到了相同的脊状形状,并发现与神经数据非常接近,”Lepora 说
“对我来说,最激动人心的时刻是当我们从3D打印的指尖查看人工神经记录时,它们看起来就像 40 多年前的真实记录!这些记录非常复杂,边缘和山脊上有山丘和斜坡,我们在人工触觉数据中看到了相同的模式,”Lepora 说。
虽然研究发现人造指尖和人类神经信号之间非常接近,但它对细节并不敏感。Lepora 怀疑这是因为3D打印的皮肤比真实皮肤更厚,他的团队现在正在探索如何在人体皮肤的微观尺度上3D打印结构。
“我们的目标是让人造皮肤与真实皮肤一样好,甚至更好,”Lepora 说。