随着反应堆达到其使用寿命,优化其核废料流以管理储存库中的有限空间至关重要。
Framatome 的虚拟远程机器人 (Virero) 团队正在测试先进的机器人技术,这将使废物专业人员能够使用增强的虚拟、机器学习和智能自动化对废物进行分类和分类。
这个 Virero 项目是与弗里德里希-亚历山大-纽伦堡大学 (FAU) 的工厂自动化和生产系统研究所 (FAPS) 和亚琛核培训研究所 (AiNT) 合作实施的。
其使用的一个案例研究是在德国处理可忽略不计的发热废物。根据《责任重组核废料管理法》,经营核电站的德国能源公司有权并有义务在妥善包装废料的情况下将此类剩余材料送往处置库设施。然而,这些废物最终将被安置的康拉德处置库仍在建设中。BGZ Gesellschaft für Zwischenlagerung GmbH 负责废物的临时储存,直到永久储存库完成。
在此过渡期间,存储非常宝贵。因此,进入废物的体积优化至关重要。Virero 解决了这一挑战。
Virero(用于辐射分类的虚拟远程机器人)项目使用遥控拆卸和重新分类放射性废物,从低到高的局部剂量率值来优化废物量。
当今可用的常规系统不够灵活,无法适应各种不同的运行条件,也没有明确设计用于核环境。他们面临着分解和划分包装垃圾的挑战。各个部分的高度个性化特征带来了更多挑战。
该系统通过对不同剂量率水平的放射性废物进行拆卸和重新分类来减少废物量。放射学表征之后是空间活动重建,这为废物处理生成了基本信息。可以识别和分离具有高剂量率的废物。分析的放射性废物可以半自动分类和拆卸,通过虚拟环境界面控制过程,然后详细记录以进行最终存储。
Virero 项目专注于运营废物,例如滤芯、袋式过滤器或金属废物。废物的分离和分类基于大量空间分辨的剂量率测量或空间分辨的伽马光谱测量。将创新的核辐射测量技术与 Virero 系统中经过行业验证的激光扫描技术相结合,可以重建所有废物。
由于 Virero 是一个正在进行的研发项目,因此开发是在未来系统的原型上进行的。最终系统将根据研究项目的结果重新设计。
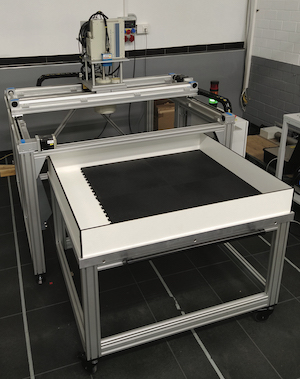
为了对废物进行放射性表征,必须从废物桶中取出材料。几个机器人运动学、传感器和外围系统,如夹具和分离工具,被集成到测试设施中以处理废物。大块用机械切割剪切割,然后与其他废物一起展开,以便在测量台上进行放射学表征。用于此目的的运动系统是在 FAPS 构建的(图 1)。

精确的对象和环境表示是基于机器人的遥操作的基础。机器人半自动分拣过程中的处理任务需要准确表示环境以及分拣系统工作区域中废物的位置。
精确的表示需要高图像质量和低传输延迟,才能在虚拟现实 (VR) 环境中将可移动的废品分类为数字双胞胎(图 2)。
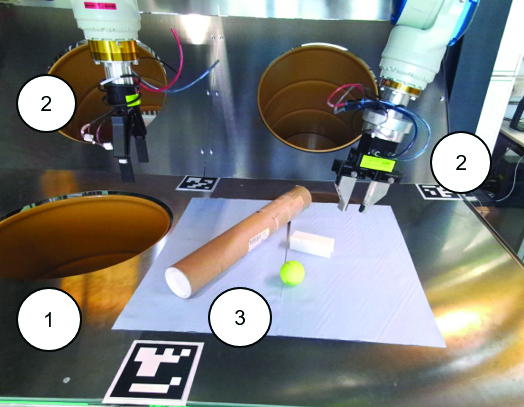
使用3D线轮廓扫描仪对要分类的废物进行几何表征,其光学扫描速率高达 5kHz,高度分辨率约为 25µm。
为了完整记录被测材料,线扫描仪在测量台上多条路径移动,记录的高度轮廓被传输到公共点云中。
在进行放射学表征之前,会立即对每块废物进行激光扫描。
激光扫描完成后,开始进行放射学表征。原型扫描表如图 3 所示。
在 Virero,放射学表征方法的开发超出了当前的科学技术水平。
对于放射学表征,法马通的合作伙伴 AiNT 正在测试三个不同灵敏度的伽马光谱检测器和一个 Geiger-Müller 计数管的使用。伽马光谱检测器是高灵敏度HPGe半导体检测器(相对光峰效率为40%)、CeBr3闪烁检测器和NaI(Tl)闪烁检测器。这些探测器专为低到中等局部剂量率而设计。
与探测器相比,Geiger-Müller 计数管不提供能量分辨率。但是,它可用于高达 10Sv/h 的 LDR 值,因此即使是高活性废物也可以进行表征。

使用的探测器如图 4 所示。放射测量在离散测量位置以准直方式进行,由此在每种情况下测量来自测量台上各个空间分区的辐射信号。三个不同的准直器可以调整每个探测器的视野。这允许用户改变要测量的分区的大小。硬铅是准直器材料。
根据现有放射性进行遥控分拣需要根据空间和放射测量数据重建餐桌上废物的活动清单。废物成分可能在特定点或表面上的大面积受到污染,或者它们的活性可能几乎是均匀的(在使用过的过滤器滤芯的情况下,由中子激活的成分,如反应堆堆芯内部等)。
为了重建活动,在测量期间记录在探测器中的核素特定净脉冲由记录的伽马光谱确定。还需要光峰效率,以量化检测到从废物发出的辐射的可能性。
使用 AiNT 内部开发的 Tracer 模拟 Photopeak 效率。Tracer 考虑了废物的伽马自屏蔽和活动分布。它使用从3D激光扫描的全局点云中获得的体积信息。
为了抓取废物,估计遥控或部分自动化处理机器人的抓取姿势。这需要以点云的形式快速、可靠和明确地检测废物。这是通过3D激光扫描创建的。来自3D相机的额外点云从不同的角度集成到系统中。使用基于点云的对象定位和姿态估计方法开发了用于空间表征的相应软件管道。
或者,增强虚拟性(见下文)是一种处理选项。
使用集成的3D相机获得正确表示要处理的废物的信息。通过将有关动态捕获的片段的信息叠加在静态组件和移动机器人系统的表示上,可以创建“增强虚拟性”。
一个挑战是捕获对象的用户友好表示。通过使用多个点云,可以显示动态感测对象的完整表示,而与操作员的视角无关。然而,用户可能会受到噪音的影响,并且会因在虚拟现实中直接表示点云而感到恼火。因此,使用 CAD 数据形式的动态对象的渲染表示来改进虚拟现实应用程序的人体工程学,这些数据显示在点云的位置。为了识别和确定物体的姿势,FAPS 评估和开发了来自多种机器学习和智能自动化方法的管道。
Virero 项目的一个中心任务是进一步开发这种方法,以便可以有效地识别许多变化很大的部分(参见图 5)。

照片文档可以由操作员在 VR 环境中手动或自动生成。
在手动情况下,立体相机使用 VR 中的 AV 菜单拍摄图像。操作员可以为废料部分和所选相机选择最佳图像位置。捕获的图像与来自放射学特征的数据和任何其他数据(例如尺寸和重量估计)一起存储,并自动分配给选定的桶进行分类。
Virero 项目解决的一个研究问题是推导分类标准。对分拣过程进行记录并进行相应的监控。在操作员手动遥控分拣的情况下,行动建议会显示在 VR 中。照片文档还包括废物部件图像的叠加及其重建的活动分布。这允许将放射学表征结果嵌入到调节活动文档中。
将自动核素特定活动重建与基于 VR 或 AR 的遥控分拣相结合具有技术和经济优势。
单个废物部分的精确活度重建可能允许包装放射性废物的体积优化。通过分离高活性废物成分,可以分离热点并将其送入单独的调节过程。这导致要包装的高放射性废物量减少并降低成本。
与目前在热室中使用的机械遥控机械手相比,遥控机械臂具有几个优点。几乎所有现有的热室都是为使用高活性物质进行精细运动而设计的。他们不能进行需要使用武力的拆除和分离程序,例如打碎混凝土基体或切割金属结构。
Virero 研发项目中使用的机械臂可以从不同的制造商处订购不同尺寸和设计的“现成”。用于处理具有强大工具的物体的重型机器人和用于处理单个物品的小型移动机器人的混合物正在作为选项进行测试。
与经典机械手系统的一个不同之处在于,不再需要操作员和机械臂之间的机械耦合。由于虚拟现实可以实现操作员和机械手的空间解耦,因此无需在热室附近设置永久性工作站。在 Virero 项目中测试的部分自动化也提高了分拣过程的效率,因为与完全手动的分拣系统相比,它可以实现更长的操作时间。
由于紧凑和模块化的设计,它可以快速集成到调节过程中。这有助于最大限度地减少运输和相关的时间延误和风险。